Автопилот — это система, состоящая из электрических или электронных навигационных устройств, способных контролировать перемещение судна без необходимости постоянного вмешательства человека. Автопилот позволяет капитану отходить от руля катера на определенный промежуток времени. Долгое время такие системы успешно применяются на коммерческих, парусных и других судах, упрощая процесс навигации и повышая его безопасность. Также автопилотами могут комплектоваться частные морские и речные маломерные суда, такие как яхты и катера. Бюджетные модели автопилотов обычно стоят около 60 тыс. рублей, хотя цены на дорогие версии могут достигать 250-300 тыс. рублей.
Как работают судовые автопилоты
Работа судового автопилота основана на принципах, аналогичных системе круиз-контроля автомобиля, за тем исключением, что не требуется ручного управления рулем или штурвалом. Как только судно удерживает заданный курс в течение определенного времени, активируется автопилот, который затем контролирует движение судна. Компьютерная система запоминает путь и автоматически корректирует положение руля, чтобы сохранить судно на выбранном курсе даже при условиях сильного ветра или течения.
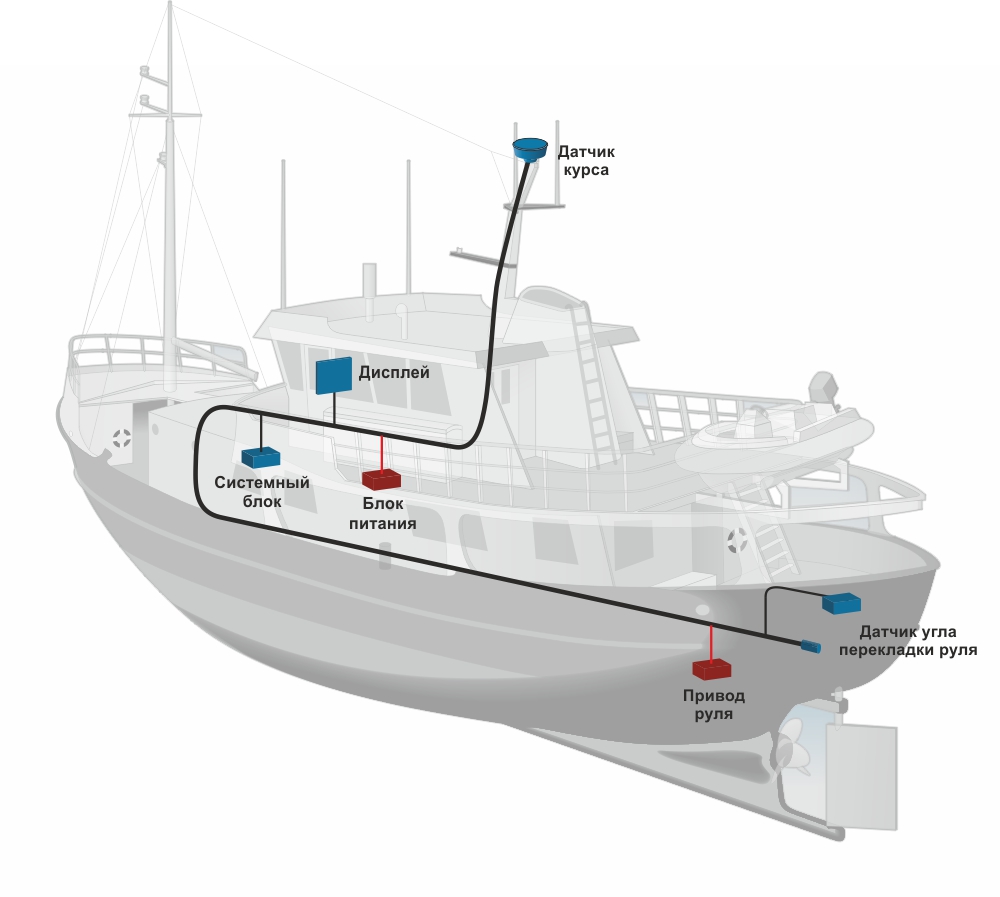
Структурно автопилот состоит из трех основных элементов: встроенного в компьютер компаса (или центрального процессора), приводного блока, и блока управления.

Типы лодочных автопилотов
Типы автопилотов могут отличаться в зависимости от длины судна, его водоизмещения и способа управления рулем, а также места размещения — над палубой или под ней.
- Надпалубные автопилоты
Надпалубные автопилоты являются идеальным решением для маломерных судов, лодок и катеров, оснащенных штурвалами или рулевым колесом. Это подразумевает недорогое, простое в использовании и обслуживании оборудование, в котором применяются энергоэффективные электрические соединения. Широкий выбор таких автопилотов в разном ценовом диапазоне делает их весьма доступными даже для начинающих владельцев катеров.
Большая часть румпельных автопилотов использует электрический привод для управления рулем. Компьютер передает электрические сигналы приводу, изменяющему положение румпеля и позволяющему оставаться на выбранном курсе. В зависимости от конструкции, некоторые устройства крепятся напрямую к верхней части руля.
Существует и другой вид надпалубных автопилотов, предназначенных для судов с штурвальным управлением. Этот тип автопилота связывается непосредственно с штурвалом судна с использованием ремня или зубчатых колес, которые вращаются за счет маломощного двигателя.

- Подпалубные автопилоты
Подпалубные автопилоты являются наилучшим выбором для моторных и парусных судов длиной свыше 12 метров. Они обладают большей мощностью, могут выполнить больший диапазон функций и предоставляют лучшее управление рулем для дальних путешествий. Вместе с этим, они расходуют больше электроэнергии и требуют более точной настройки. Подпалубные автопилоты обычно состоят из трех элементов:
2.1. Курс-компьютер: важнейший компонент, который включает в себя флюсгейт-компас, отвечающий за стабилизацию курса и ориентацию судна на водной поверхности. Он использует электронные средства и синхронизирует данные с гироскопическим компасом. Данные флюсгейт-компаса могут быть связаны с навигационными картами, GPS и радаром. В курсовом компьютере также находится магнитный и гироскопический компасы. Гироскоп представляет собой датчик угловых изменений положения судна относительно его курса и корректирует ошибки флюсгейт-компаса. Магнитный компас служит для ориентации по сторонам света;
2.2. Привод: это «рабочая лошадка» автопилота, которые перемещает руль при помощи электричества или гидравлики. В подпалубных автопилотах применяются три базовых типа:
— Линейный: наиболее часто используемый для парусных судов. Работает на электричестве и управляет перемещением руля;
— Поворотный: применяется в цепных и колесных системах, оборудованных звездочками на 13-25 зубьев;
— Гидравлический: устанавливается на катерах с гидравлическим рулевым управлением. Гидравлический узел привода должен быть соответствующим размеру имеющегося гидравлического плунжера;
2.3. Блок управления. Этот элемент служит своего рода связующим звеном между рулевым устройством и автопилотом. В нем, как правило, используется светодиодный экран для отображения информации и различные управляющие элементы, такие как ручки, джойстики или кнопки.
Преимущества автопилота
Автопилот привносит значительные преимущества во время водных путешествий:
- Экономия топлива за счет точного следования заданному курсу и сокращения времени плавания, особенно на судах, оснащенных GPS;
- Для рыбалки с катера, предварительно запрограммированный курс может увеличить продуктивность рыбалки;
- Большинство моделей автопилота обладают «самообучающимся» функционалом, позволяющим им запоминать положение рулевого колеса, которые необходимы для удержания курса и избегания излишнего или недостаточного руления;
- Благодаря возможности автопилота поддерживать стабильный курс без вмешательства капитана, эти устройства стали практически стандартной частью оснащения больших парусных и моторных судов.
Недостатки автопилотов
Несмотря на преимущества, которые предоставляет установка автопилота на ваш катер, он также имеет определенные недостатки:
- В случае необходимости ремонта, повторной калибровки или замены компонентов автопилота во время плавания, выполнение технического обслуживания может вызвать проблемы;
- Неблагоприятные погодные условия могут влиять на скорость реагирования автопилота на изменения курса, что может привести к повышенной нагрузке на электрическую систему;
- Проникновение воды в компьютер может вызвать коррозию, а неисправность компонентов приводного двигателя и соединений может привести к отказу автопилота или генерации неверных данных;
- Даже временное оставление руля без присмотра, без включенного автопилота может вызвать отклонение от курса и создать потенциально опасные ситуации;
- Электрическая мощность, требуемая для работы автопилота в условиях плохой погоды, может быть чрезвычайно высокой, а внезапные скачки напряжения могут спровоцировать отказ устройства или генерацию некорректных данных.